~ 目次 ~
1. 今回やりたいこと
今まで(本連載の4~9回)は9つのボタンを押すことでラジコンを操縦していました。このボタン式のコントローラだと滑らかに操縦ができません(;^ω^)
今回からスライダ式に変更して、滑らかに操縦できるようにしました!

2. 動作原理
基本的な動作原理はこちらの記事で紹介したものと同じですが、今回はステアだけでなくスロットルの信号も追加しました。これでラジコンのハンドルとアクセルの両方が操作できるようになります。(下図)

動作原理を下の図にまとめました。ステアの信号をCH1、スロットルの信号をCH2とします。
大まかな処理手順は、
- スマホアプリ側からステア、スロットルの信号を1つの文字列として送信(ステア、スロットル信号はカンマ(,)で区切る)
- マイコン側で文字列を受け取り、カンマ(,)で分割1
- 分割した文字列の左側をCH1(ステア)、右側をCH2(スロットル)の信号とする
- CH1とCH2の値に基づいてサーボモータとESCをそれぞれ制御し、ステアとスロットルを操作
となります。ここで、手順1はスマホアプリ側、手順2~4はマイコン(ESP32)側で行っている処理になります。

3. 改良の過程
3.1. スマホアプリの改良
3.1.1. アプリの全体像
こちらが改良後のアプリになります。
実際の送信機(プロポ)ではスティックを使ってステアとスロットルを操縦しますが、アプリ上ではスティックの代わりにスライダで操縦します。
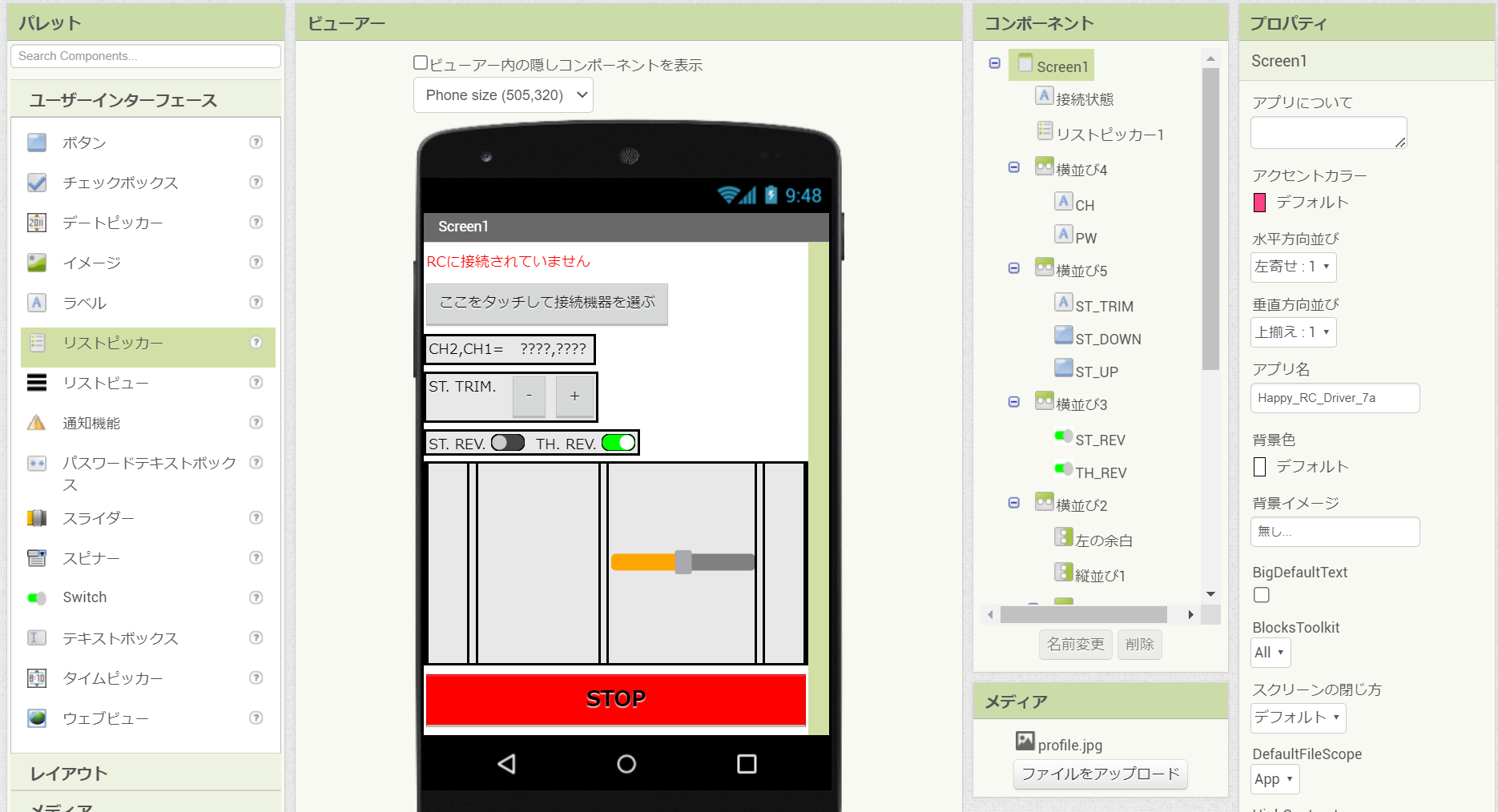
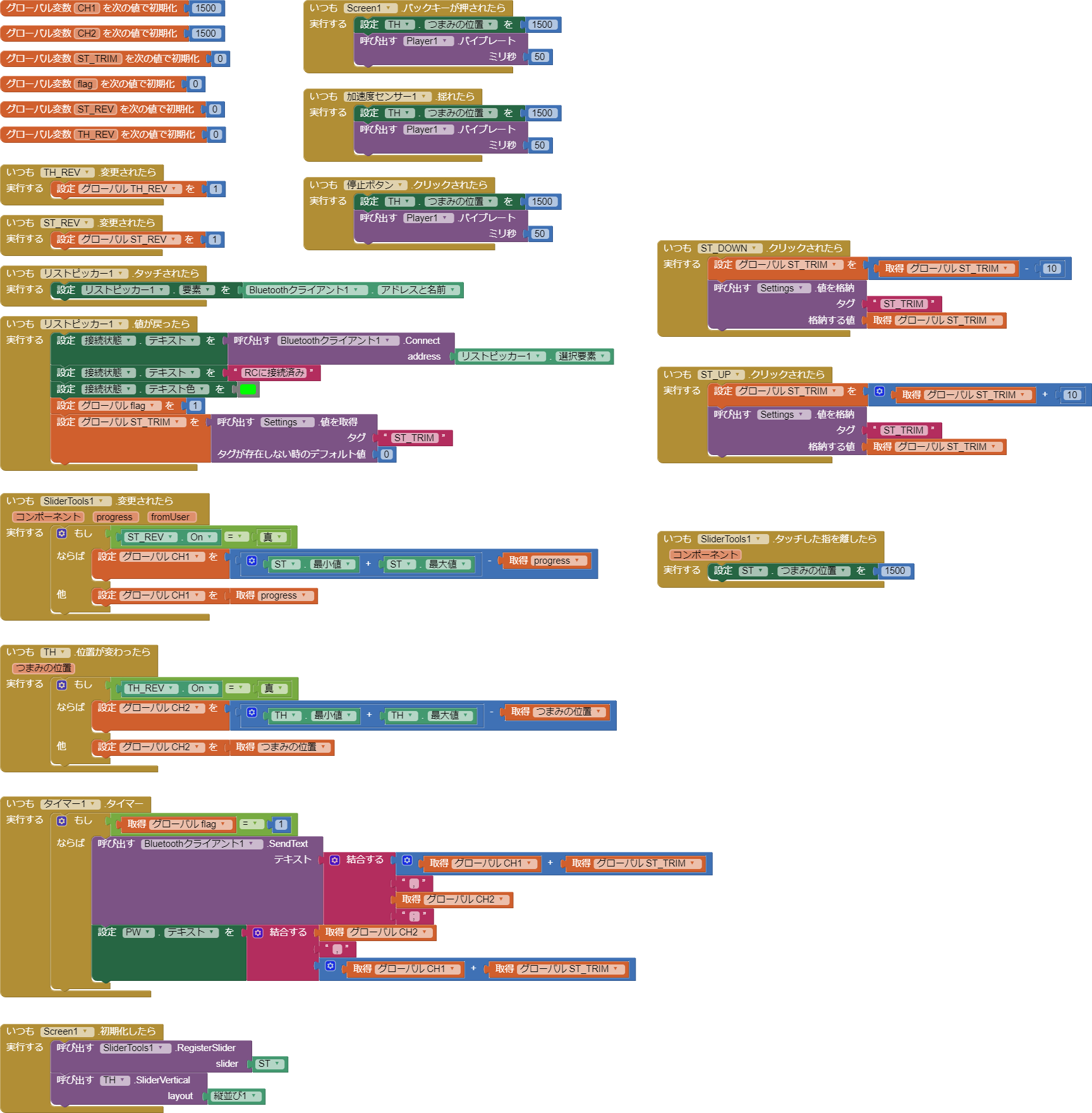
MIT App Inventorには元々縦向きのスライダが用意されていないので、Juanさんの作成した垂直スライダの拡張機能 SliderVertical.aix2 を使用しました。ここでは、アプリの起動と同時に縦向きのスライダが生成(なのでデザイン編集タブでは縦向きスライダが表示されていない)するようにしています。
さらに、スライダから指を離すとステアが中立位置に戻るようにしました。
この処理には、WatermelonOofさんのSliderTools-AI2-Kodular-Extension3を使用しました。スロットルも同じようにしたかったのですが、垂直スライダ用の拡張機能との組み合わせが難しく、とりあえず諦めました(笑)
3.1.2. ステアリングトリム(ST. TRIM)機能
本格的なラジコン用プロポと同じようにステアリングトリム(ST. TRIM)を実装しました。「+」、「-」ボタンを押すことで車体がまっすぐ走るように調整することができます。
3.1.3. 動作方向反転(ST. REV、TH. REV)機能
ステアやスロットルが動いてほしい方向と逆のときに、動作方向を修正できる機能です。スイッチの使い方が分からなかったので、YouTube動画4を参考に作業しました。
3.2. レシーバ側プログラムの改良
改良版のプログラムがこちらになります。スマホアプリから受け取ったパルス幅に基づいてステア・スロットルを操作します。
さらに、安全性に配慮してアプリが閉じたときは走行を停止する処理を入れています。(ver.5bで採用)
/* Happy_RC_Receiver(version 7a) *****************************
Download a Transmitter App:https://github.com/TomokiIkegami/Happy_RC_Driver/raw/main/Happy_RC_Driver.apk
About this Project:https://github.com/TomokiIkegami/Happy_RC_Driver
◆ 動作
1.スマホアプリ(Happy_RC_Receiver)から命令(ステア、スロットルのパルス幅)を取得
2.取得した命令に基づいて、RCを前後左右に操作
◆ 機能
・アプリを開いていないときは、車体を停止させる安全機能を装備(Dragブレーキ付きESCを使用すること)
・アプリ再起動時には、スロットルを中立に戻さないと走行しない(アプリ再起動時に急に走行する危険を防ぐため)
・カクカクではなく滑らかな走行が可能
◆ 補足
・プログラム中で★マークがついている部分は、自分の装置に合わせて調整
*************************************************************/
/*ハードウェアの接続ピンの設定*/
#define LED_PIN 2 //走行には無関係。2番ピンにLEDのアノード(+)を接続すると割り込み処理の間隔(100ms)でLEDが点滅
#define LED_PIN_ACTIVE 17 //走行には無関係。17番ピンにLEDのアノード(+)を接続すると、アプリ起動時のみLEDが点灯
#define SERVO_PWM_PIN 4 //サーボモータのPWMピン(信号入力ピン)をESP32の4番ピンに接続 ★回路と対応した番号にする
#define ESC_PWM_PIN 16 //ESCのPWMピン(信号入力ピン)をESP32の16番ピンに接続 ★回路と対応した番号にする
/*タイマーの定義*/
hw_timer_t*timer = NULL;
/*ライブラリ*/
#include "BluetoothSerial.h" //ESP32のBluetooth通信に使用
/*ステアとスロットルの設定*/
int PWM_period = 20000; //PWM周期をT=20000[μs]に設定
int center_pos = 1500; //ステア中心位置 [サーボモータ中心位置のパルス幅 (1500)]
int neutral_pos = 1500; //中立位置 [スロットル中立位置のパルス幅 (1500)
int CH1 = center_pos; //パルス幅Tonを1500[μs](中立)に設定。データシートにはLeft=900[μs]、Neutral=1500[μs]、Right=2100[μs]と記載されていた。(HiTEC DB777WP)
int CH2 = neutral_pos; //パルス幅Tonを1500[μs](中立)に設定。
/*プログラムの流れを制御する変数*/
int flag = 0; //アプリの起動状態を管理する変数。アプリがバックグラウンドに入ったときは1に設定する。アプリがバックグラウンドから復帰し、アプリのPボタンが押されたら0に設定してラジコン操作を有効にする。
String input = "1500,1500"; //入力信号
unsigned long t1 = 0; //データ受信時間
unsigned long t2 = 0; //割り込み時の時間
unsigned long td = 0; //データ受信時間と割り込み時間の差
unsigned long t_loss_ST = 0; //ステア操作で失われた時間
unsigned long t_loss_TH = 0; //スロットル操作で失われた時間
unsigned long curr; /*現在時刻を取得*/
unsigned long prev_ST = 0; /*前時刻を保存*/
unsigned long prev_TH = 0; /*前時刻を保存*/
/*Bluetooth通信に必要*/
BluetoothSerial ESP_BT; //ESP_BTという名前でオブジェクトを定義
/*割り込み関数onTimerで実行される内容*/
void IRAM_ATTR onTimer() {
digitalWrite(LED_PIN, !digitalRead(LED_PIN)); //前の出力と反転して点灯(チカチカする)
t2 = millis(); //割り込み時の時間を測定(100ms間隔)
td = t2 - t1; //割り込み時の時間と命令取得時間の差を取る。この差が大きいとき、アプリは起動していない状態。
}
/*PWM制御でサーボモータの角度を制御する関数*/
void change_ST_pos(int goal_pos) {
/*20000[μs]周期で幅CH1[μs]のパルス波生成*/
digitalWrite(SERVO_PWM_PIN, HIGH); //PWMピンの電圧を5[V]に
delayMicroseconds(goal_pos); //パルス幅(goal_pos=900~2100[μs]:DB777WPの場合)
digitalWrite(SERVO_PWM_PIN, LOW); //PWMピンの電圧を0[V]に
delayMicroseconds(PWM_period); //制御周期(T=20000[μs])
}
/*PWM制御でスロットルを制御する関数*/
void change_TH_pos(int goal_pos) {
/*20000[μs]周期で幅CH1[μs]のパルス波生成*/
digitalWrite(ESC_PWM_PIN, HIGH); //PWMピンの電圧を5[V]に
delayMicroseconds(goal_pos); //パルス幅(goal_pos=900~2100[μs]:DB777WPの場合)
digitalWrite(ESC_PWM_PIN, LOW); //PWMピンの電圧を0[V]に
delayMicroseconds(PWM_period); //制御周期(T=20000[μs])
}
/*文字列を分割するための関数(分割数を戻り値とする)*/
void split(String data, char delimiter, String *dst) {
// data:分割したい文字列、delimiter:区切り文字、*dst:分割後の文字を入れる配列
int index = 0; //分割後の文字をどこに入れるか決める
int i; //カウンタ変数
int datalength = data.length(); //文字列の長さを取得
for (i = 0; i < datalength; i++) { //文字列を1文字ずつスキャン
char tmp = data.charAt(i); //tmp:文字を入れておく一時的な変数
if (tmp == delimiter) {
index++; //区切り文字があったら、配列の添え字を増やす
} else {
dst[index] += tmp; //文字を1文字ずつ結合して、文字列を作成
}
}
}
void setup() {
/*出力ピン設定*/
pinMode(SERVO_PWM_PIN, OUTPUT); //サーボモータのピンへ、ArduinoからPWM出力するように設定
pinMode(ESC_PWM_PIN, OUTPUT); //ESCのピンへ、ArduinoからPWM出力するように設定
Serial.begin(115200); //シリアルモニタで確認用。伝送速度を115200[bps]に設定
ESP_BT.begin("ESP32_RC_Receiver"); //接続画面で表示される名前を設定 ★好きな名前にしてよい
/*割り込み処理(アプリ停止の検知に必要)の設定*/
pinMode(LED_PIN, OUTPUT); //LEDの点灯ピンを出力用に設定
timer = timerBegin(0, 80, true); //80クロック1カウント
timerAttachInterrupt(timer, &onTimer, true); //onTimerという名前の関数で割り込み
timerAlarmWrite(timer, 1000000 * 0.1, true); //80クロック×1000000カウント=1秒、1*0.1=100[ms]
timerAlarmEnable(timer); //タイマー有効化
}
void loop() {
if (ESP_BT.available()) { //available()で受信した文字があるか確認。あればif文内の処理を実行。
t1 = millis(); //データを取得した時間を記録
input = ESP_BT.readStringUntil(';'); //文字をセミコロン(;)まで読んで、文字列として変数inputに保存。
String cmds[2] = { "\0" }; //この配列に分割された信号を格納
split(input, ',', cmds); //文字列inputを分割&cmdsに保存
CH1 = (cmds[0]).toInt(); //CH1(ステア)の値
CH2 = (cmds[1]).toInt(); //CH2(スロットル)の値
// /*受信したパルス幅の表示*/
// Serial.print(CH1);
// Serial.print(',');
// Serial.print(CH2);
// Serial.print('\n');
}
/*Pボタンが押されたらラジコンの操作を有効する(安全のため)*/
if (flag == 1 && CH2 == 1500) {
flag = 0;
}
/*アプリ起動時(flag==0のとき)は操作を有効にする*/
if (flag == 0) {
change_ST_pos(CH1); //受信したパルス幅でサーボモータの角度を制御
change_TH_pos(CH2); //受信したパルス幅でスロットルを制御
}
/*シリアルモニタで確認用(ラジコンの制御には無関係)*/
Serial.print("Received signal=");
Serial.print(input);
Serial.print(",");
Serial.print("t1=");
Serial.print(t1);
Serial.print(",");
Serial.print("t2=");
Serial.print(t2);
Serial.print(",");
Serial.print("t2-t1=");
Serial.print(td);
Serial.print(",");
/*アプリがバックグラウンドに入ったとき(もしくは閉じたとき)、車体を停止させる処理(安全のため)*/
if (td > 150) {
Serial.print("Transmitter is NOT active"); //NOT active:アプリはバックグラウンド状態(もしく閉じている)
Serial.print("\n");
change_TH_pos(neutral_pos); //中立(Neutral)
input = " ";
digitalWrite(LED_PIN_ACTIVE, LOW); //アプリがバックグラウンドに入ったとき(もしくは閉じたとき)はLEDを消灯
flag = 1; //アプリがバックグラウンド状態に入った(もしく閉じた)ときはflag=1に設定
} else {
Serial.print("Transmitter is active"); //active:アプリの画面が開いている
Serial.print("\n");
digitalWrite(LED_PIN_ACTIVE, HIGH); //アプリ起動時(画面を開いているとき)にはLEDを点灯
}
}4. 実験動画
自作スマホアプリ上のスライダを動かすと、ステア(ハンドル)とスロットル(アクセル)が動きました!(/・ω・)/
色々なラジコンカーを操作できて嬉しいです!
5. サンプルファイル
作成したアプリのデータはこちらになります。改良して愛車に搭載するなど自由に楽しんでください!
~ MIT App Inventorプロジェクトのファイル(.aia) ~
~ ビルド済み Androidアプリのファイル(.apk) ~
6. 関連記事
- 前回 →→→ Bluetooth モジュールでRCサーボ・ESCを制御したい [第9回-外出先でもプログラムを編集したい]
- 次回 →→→ Bluetooth モジュールでRCサーボ・ESCを制御したい [第11回-接続状態表示のバグ修正]
7. 参考文献
-
joho.info「【Arduino】文字列を区切り文字で分割(split関数)」、(https://algorithm.joho.info/arduino/string-split-delimiter/) ↩︎
-
KIO4.com「App inventor 2 en español」、(http://kio4.com/appinventor/294K_extension_crear_Deslizador.htm) ↩︎
-
GitHub「SliderTools-AI2-Kodular-Extension」、(https://github.com/WatermelonOof/SliderTools-AI2-Kodular-Extension/) ↩︎
-
Coding Hats「How to use Switch component in MIT App Inventor」、(https://www.youtube.com/watch?v=bUoFdjTRsmI) ↩︎