~ 目次 ~
1. 今回やりたいこと
前回は安全性をアップさせるためにラジコンカーの停止処理を工夫しました。
前回は動きがカクカクだったので、今回は滑らかに動くように改良します!
2. 改良の過程
この記事のタイトルは ”bluetoothモジュールで…" となっていますが、今回もESP32を使ってBluetooth接続をします。
装置やアプリ(Happy_RC_Driver_5b)は前回と同じです。
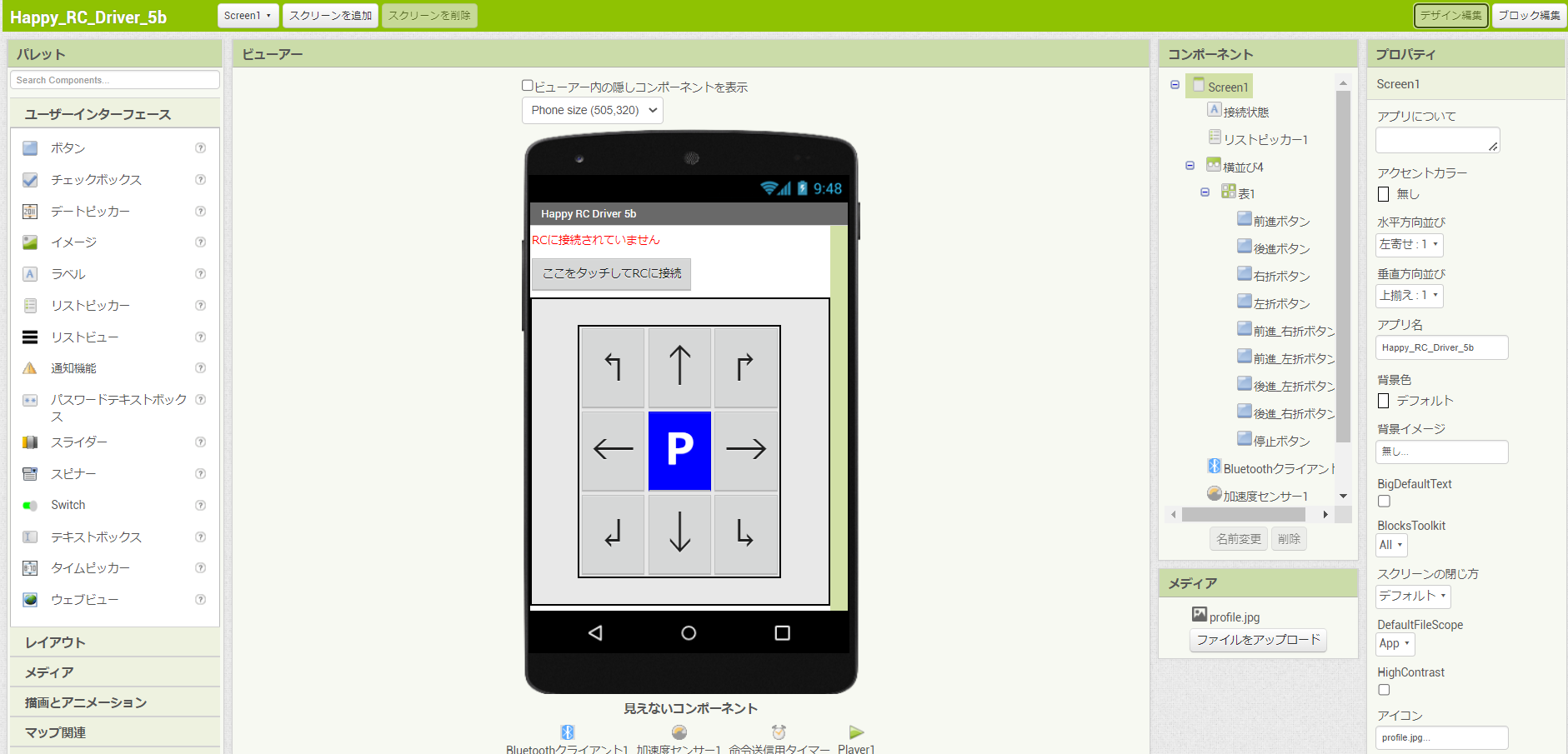
☝ アプリ外観(デザイン編集タブ)
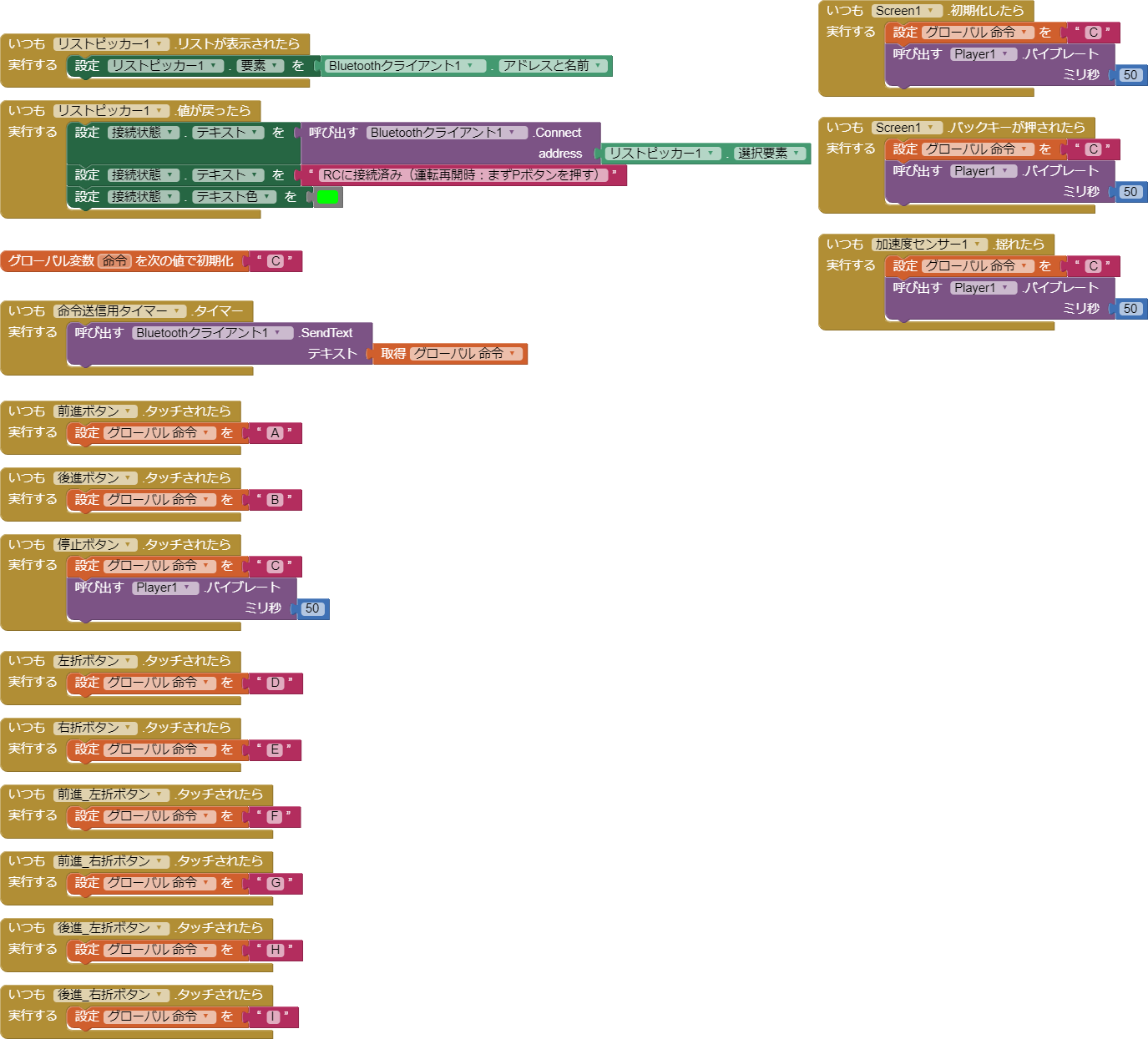
☝ アプリの中身(ブロック編集タブ)
2.1. ◆ ver.6a ~delay()を使ってゆっくり動かす~
こちらがArduinoマイコンに書き込んだソースコードです。
setup文の上にある、change_ST_pos,change_TH_pos という関数がそれぞれステア、スロットルを操作する関数です。forループで角度を1°ずつ変化させて操作します。
角度の変化をdelayで遅らせてゆっくり動かしていますが、これだと加減速中・ステア操作中に操作が効きません(笑)
⇩⇩⇩ ソースコード ⇩⇩⇩
/* Happy_RC_Receiver(version 6a) *****************************
Download a Transmitter App:https://github.com/TomokiIkegami/Happy_RC_Driver/raw/main/Happy_RC_Driver.apk
About this Project:https://github.com/TomokiIkegami/Happy_RC_Driver
◆ 動作
1.スマホアプリ(Happy_RC_Receiver)から命令('A'~'I')を取得
2.取得した命令に基づいて、RCを前後左右に操作
◆ 機能
・アプリを開いていないときは、車体を停止させる安全機能を装備(Dragブレーキ付きESCを使用すること)
・アプリ再起動時には、走行停止ボタン(画面中央のPボタン)を押さないと走行しない(アプリ再起動時に急に走行する危険を防ぐため)
・カクカクではなく滑らかな走行が可能に
◆ 補足
・プログラム中で★マークがついている部分は、自分の装置に合わせて調整してください。
*************************************************************/
/*ハードウェアの接続ピンの設定*/
#define LED_PIN 2 //走行には無関係。2番ピンにLEDのアノード(+)を接続すると割り込み処理の間隔(100ms)でLEDが点滅
#define LED_PIN_ACTIVE 17 //走行には無関係。17番ピンにLEDのアノード(+)を接続すると、アプリ起動時のみLEDが点灯
#define SERVO_PWM_PIN 4 //サーボモータのPWMピン(信号入力ピン)をESP32の4番ピンに接続 ★回路と対応した番号にする
#define ESC_PWM_PIN 16 //ESCのPWMピン(信号入力ピン)をESP32の16番ピンに接続 ★回路と対応した番号にする
/*タイマーの定義*/
hw_timer_t*timer = NULL;
/*ライブラリ*/
#include "BluetoothSerial.h" //ESP32のBluetooth通信に使用
#include <Servo.h> //サーボモータの制御に使用
/*ESC,サーボのオブジェクト作成*/
Servo myservo; // サーボモータを制御するためのServoオブジェクト作成
Servo myesc; // ESCを制御するためのServoオブジェクト作成
/* ステアリングの設定 */
int mov_speed_ST = 40; //ステア移動速度
int center_pos = 93; //ステア中心位置 [サーボモータの中心位置 (90°)] ★まっすぐ走るように調整。90より大きい値にするとステア(ハンドル)が右寄りに、90より小さい値にするとステア(ハンドル)が左寄りになる
int left_DR = 20; //左の切れ角 ★:好みに合わせて調整。ただし大きくしすぎないように注意。
int right_DR = 25; //右の切れ角 ★:好みに合わせて調整。ただし大きくしすぎないように注意。
int left_max = center_pos - left_DR; //左ステアの最大位置 [中心位置より反時計回りに20°(left_DR)回転した位置] ★逆に動くときはleft_DRの手前の符号をプラス(+)に
int right_max = center_pos + right_DR; //右ステアの最大位置 [中心位置より時計回りに25°(right_DR)回転した位置] ★逆に動くときはright_DRの手前の符号をマイナス(-)に
/* スロットルの設定 */
int mov_speed_TH = 0; //スロットル移動速度
int mov_speed_brk = 40; //ブレーキ速度
int neutral_pos = 91; //中立位置 [スロットルの中立位置 (90) ★ESCの設定によってずれがあるので、前後に走行しないよう値を調整する。※ ESC側を90で中立になるよう設定(上級者向け。ESCの説明書通りプロポでニュートラル設定を済ませてから、このプログラムの値を調整するのがオススメ)してもよい。]
int forward_DR = 20; //前進の速さ ★好みの速度に調整
int backward_DR = 20; //バックの速さ ★好みの速度に調整
int forward_max = neutral_pos + forward_DR; //前進の最大位置 ★逆に動くときはforward_DRの手前の符号をマイナス(-)に
int backward_max = neutral_pos - backward_DR; //バックの最大位置 ★逆に動くときはbackward_DRの手前の符号をプラス(+)に
/*値設定の注意点*/
//速度(mov_speed_ST,mov_speed_TH)は 0-50 の範囲で与える。(0:最低速度、50:最大速度)
//スロットル、サーボモータの値(pos)の範囲は、 0≦ pos ≦180 で与える。
//myservo.write 関数には回転角を絶対的な位置で与える。例) 90°から 45°反時計回りに動いてほしいときは、-45ではなく、45を関数に入力する。
/*ステアとスロットルの位置を記憶する変数*/
int CH1 = center_pos;
int CH2 = neutral_pos;
/*プログラムの流れを制御する変数*/
int flag = 0; //アプリの起動状態を管理する変数。アプリがバックグラウンドに入ったときは1に設定する。アプリがバックグラウンドから復帰し、アプリのPボタンが押されたら0に設定してラジコン操作を有効にする。
char input = 'C'; //入力信号
unsigned long t1 = 0; //データ受信時間
unsigned long t2 = 0; //割り込み時の時間
unsigned long td = 0; //データ受信時間と割り込み時間の差
unsigned long t_loss_ST = 0; //ステア操作で失われた時間
unsigned long t_loss_TH = 0; //スロットル操作で失われた時間
/*Bluetooth通信に必要*/
BluetoothSerial ESP_BT; //ESP_BTという名前でオブジェクトを定義
/*割り込み関数onTimerで実行される内容*/
void IRAM_ATTR onTimer() {
digitalWrite(LED_PIN, !digitalRead(LED_PIN)); //前の出力と反転して点灯(チカチカする)
t2 = millis(); //割り込み時の時間を測定(100ms間隔)
td = t2 - t1; //割り込み時の時間と命令取得時間の差を取る。この差が大きいとき、アプリは起動していない状態。
}
unsigned long change_ST_pos(int start_pos, int goal_pos, int mov_speed) {
int i; //カウンタ変数
int loss_time; //delayの分遅れた時間
/*ステアを切る処理*/
//右折
if (goal_pos - start_pos > 0) {
for (i = start_pos; i < goal_pos; i++) {
delay(50 - mov_speed);
myservo.write(i);
}
//左折
} else if (goal_pos - start_pos < 0) {
for (i = start_pos; i > goal_pos; i--) {
delay(50 - mov_speed);
myservo.write(i);
}
//その他→ステアはそのまま
} else {
myservo.write(start_pos);
}
CH1 = goal_pos; //現在のステア位置を更新
return loss_time = i *(50- mov_speed); //処理にかかった時間を返す
}
unsigned long change_TH_pos(int start_pos, int goal_pos, int mov_speed) {
int i; //カウンタ変数
int loss_time; //delayの分遅れた時間
/*スロットルを操作する処理*/
//加速
if (goal_pos - start_pos > 0) {
for (i = start_pos; i < goal_pos; i++) {
delay(50 - mov_speed);
myesc.write(i);
}
//減速またはバック
} else if (goal_pos - start_pos < 0) {
for (i = start_pos; i > goal_pos; i--) {
delay(50 - mov_speed);
myesc.write(i);
}
//その他→スロットルはそのまま
} else {
myesc.write(start_pos);
}
CH2 = goal_pos; //現在のスロットル位置を更新
return loss_time = i *(50- mov_speed); //処理にかかった時間を返す
}
void setup() {
pinMode(LED_PIN_ACTIVE, OUTPUT); //LEDの点灯ピンを出力用に設定
Serial.begin(115200); //シリアルモニタで確認用
ESP_BT.begin("ESP32_RC_Receiver"); //接続画面で表示される名前を設定 ★好きな名前にしてよい
myservo.attach(SERVO_PWM_PIN); //サーボモータのPWM端子とArduinoの4番ピンを接続 ★回路と対応した番号にする
myesc.attach(ESC_PWM_PIN); //ESCのPWM端子とArduinoの16番ピンを接続 ★回路と対応した番号にする
/*勝手には走りださないように設定*/
myservo.write(center_pos); // ステアを中心(Center)に
myesc.write(neutral_pos); //中立(Neutral)
/*割り込み処理(アプリ停止の検知に必要)の設定*/
pinMode(LED_PIN, OUTPUT); //LEDの点灯ピンを出力用に設定
timer = timerBegin(0, 80, true); //80クロック1カウント
timerAttachInterrupt(timer, &onTimer, true); //onTimerという名前の関数で割り込み
timerAlarmWrite(timer, 1000000 * 0.1, true); //80クロック×1000000カウント=1秒、1*0.1=100[ms]
timerAlarmEnable(timer); //タイマー有効化
}
void loop() {
/*available()で受信した信号があるか確認*/
if (ESP_BT.available()) {
t1 = millis(); //データを取得した時間を記録
input = ESP_BT.read(); //受信したテキストを変数inputに保存
/*Pボタンが押されたらラジコンの操作を有効する(安全のため)*/
if (flag == 1 && input == 'C') {
flag = 0;
}
/*アプリ起動時(flag=0のとき)は操作を有効にする*/
if (flag == 0) {
/*命令に基づいてラジコンを制御*/
if (input == 'A') {
t_loss_ST = change_ST_pos(CH1, center_pos, mov_speed_ST); // ステアを中心(Center)に
t_loss_TH = change_TH_pos(CH2, forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'B') {
t_loss_ST = change_ST_pos(CH1, center_pos, mov_speed_ST); // ステアを中心(Center)に
t_loss_TH = change_TH_pos(CH2, backward_max, mov_speed_TH); //後退(Backward)
} else if (input == 'C') {
t_loss_ST = change_ST_pos(CH1, center_pos, mov_speed_ST); // ステアを中心(Center)に
t_loss_TH = change_TH_pos(CH2, neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'D') {
t_loss_ST = change_ST_pos(CH1, left_max, mov_speed_ST); // ステアを左(Left)に切る
t_loss_TH = change_TH_pos(CH2, neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'E') {
t_loss_ST = change_ST_pos(CH1, right_max, mov_speed_ST); // ステアを右(Right)に切る
t_loss_TH = change_TH_pos(CH2, neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'F') {
t_loss_ST = change_ST_pos(CH1, left_max, mov_speed_ST); // ステアを左(Left)に切る
t_loss_TH = change_TH_pos(CH2, forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'G') {
t_loss_ST = change_ST_pos(CH1, right_max, mov_speed_ST); // ステアを右(Right)に切る
t_loss_TH = change_TH_pos(CH2, forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'H') {
t_loss_ST = change_ST_pos(CH1, left_max, mov_speed_ST); // ステアを左(Left)に切る
t_loss_TH = change_TH_pos(CH2, backward_max, mov_speed_TH); //後退(Backward)
} else if (input == 'I') {
t_loss_ST = change_ST_pos(CH1, right_max, mov_speed_ST); // ステアを右(Right)に切る
t_loss_TH = change_TH_pos(CH2, backward_max, mov_speed_TH); //後退(Backward)
} else {
t_loss_ST = change_ST_pos(CH1, center_pos, 0); // ステアを中心(Center)に
t_loss_TH = change_TH_pos(CH2, neutral_pos, 0); //中立(Neutral)
}
}
}
/*シリアルモニタで確認用(ラジコンの制御には無関係)*/
Serial.print("Received signal=");
Serial.print(input);
Serial.print(",");
Serial.print("t1=");
Serial.print(t1);
Serial.print(",");
Serial.print("t2=");
Serial.print(t2);
Serial.print(",");
Serial.print("t2-t1=");
Serial.print(td);
Serial.print(",");
/*アプリがバックグラウンドに入ったとき(もしくは閉じたとき)、車体を停止させる処理(安全のため)*/
if (td > 150 + t_loss_ST + t_loss_TH) {
Serial.print("Transmitter is NOT active"); //NOT active:アプリはバックグラウンド状態(もしく閉じている)
Serial.print("\n");
myservo.write(center_pos); // ステアを中心(Center)に
myesc.write(neutral_pos); //中立(Neutral)
input = ' ';
digitalWrite(LED_PIN_ACTIVE, LOW); //アプリがバックグラウンドに入ったとき(もしくは閉じたとき)はLEDを消灯
flag = 1; //アプリがバックグラウンド状態に入った(もしく閉じた)ときはflag=1に設定
} else {
Serial.print("Transmitter is active"); //active:アプリの画面が開いている
Serial.print("\n");
digitalWrite(LED_PIN_ACTIVE, HIGH); //アプリ起動時(画面を開いているとき)にはLEDを点灯
}
}2.2. ◆ ver.6b ~millis()を使ってゆっくり動かす~
ver6aを改良したソースコードがこちらです。millis()を使って一定周期で処理する方法1を紹介している記事があったので、そちらを参考にさせていただきました。
delayを使わないので処理が止まることなく、加減速中・ステア操作中でも操作することができます!
⇩⇩⇩ ソースコード ⇩⇩⇩
/* Happy_RC_Receiver(version 6b) *****************************
Download a Transmitter App:https://github.com/TomokiIkegami/Happy_RC_Driver/raw/main/Happy_RC_Driver.apk
About this Project:https://github.com/TomokiIkegami/Happy_RC_Driver
◆ 動作
1.スマホアプリ(Happy_RC_Receiver)から命令('A'~'I')を取得
2.取得した命令に基づいて、RCを前後左右に操作
◆ 機能
・アプリを開いていないときは、車体を停止させる安全機能を装備(Dragブレーキ付きESCを使用すること)
・アプリ再起動時には、走行停止ボタン(画面中央のPボタン)を押さないと走行しない(アプリ再起動時に急に走行する危険を防ぐため)
・カクカクではなく滑らかな走行が可能に
◆ 補足
・プログラム中で★マークがついている部分は、自分の装置に合わせて調整
*************************************************************/
/*ハードウェアの接続ピンの設定*/
#define LED_PIN 2 //走行には無関係。2番ピンにLEDのアノード(+)を接続すると割り込み処理の間隔(100ms)でLEDが点滅
#define LED_PIN_ACTIVE 17 //走行には無関係。17番ピンにLEDのアノード(+)を接続すると、アプリ起動時のみLEDが点灯
#define SERVO_PWM_PIN 4 //サーボモータのPWMピン(信号入力ピン)をESP32の4番ピンに接続 ★回路と対応した番号にする
#define ESC_PWM_PIN 16 //ESCのPWMピン(信号入力ピン)をESP32の16番ピンに接続 ★回路と対応した番号にする
/*タイマーの定義*/
hw_timer_t*timer = NULL;
/*ライブラリ*/
#include "BluetoothSerial.h" //ESP32のBluetooth通信に使用
#include <Servo.h> //サーボモータの制御に使用
/*ESC,サーボのオブジェクト作成*/
Servo myservo; // サーボモータを制御するためのServoオブジェクト作成
Servo myesc; // ESCを制御するためのServoオブジェクト作成
/* ステアリングの設定 */
unsigned long mov_speed_ST = 40; //ステア移動速度
int center_pos = 93; //ステア中心位置 [サーボモータの中心位置 (90°)] ★まっすぐ走るように調整。90より大きい値にするとステア(ハンドル)が右寄りに、90より小さい値にするとステア(ハンドル)が左寄りになる
int left_DR = 20; //左の切れ角 ★:好みに合わせて調整。ただし大きくしすぎないように注意。
int right_DR = 25; //右の切れ角 ★:好みに合わせて調整。ただし大きくしすぎないように注意。
int left_max = center_pos - left_DR; //左ステアの最大位置 [中心位置より反時計回りに20°(left_DR)回転した位置] ★逆に動くときはleft_DRの手前の符号をプラス(+)に
int right_max = center_pos + right_DR; //右ステアの最大位置 [中心位置より時計回りに25°(right_DR)回転した位置] ★逆に動くときはright_DRの手前の符号をマイナス(-)に
/* スロットルの設定 */
unsigned long mov_speed_TH = 0; //スロットル移動速度
unsigned long mov_speed_brk = 40; //ブレーキ速度
int neutral_pos = 91; //中立位置 [スロットルの中立位置 (90) ★ESCの設定によってずれがあるので、前後に走行しないよう値を調整する。※ ESC側を90で中立になるよう設定(上級者向け。ESCの説明書通りプロポでニュートラル設定を済ませてから、このプログラムの値を調整するのがオススメ)してもよい。]
int forward_DR = 20; //前進の速さ ★好みの速度に調整
int backward_DR = 20; //バックの速さ ★好みの速度に調整
int forward_max = neutral_pos + forward_DR; //前進の最大位置 ★逆に動くときはforward_DRの手前の符号をマイナス(-)に
int backward_max = neutral_pos - backward_DR; //バックの最大位置 ★逆に動くときはbackward_DRの手前の符号をプラス(+)に
/*値設定の注意点*/
//速度(mov_speed_ST,mov_speed_TH)は 0-50 の範囲で与える。(0:最低速度、50:最大速度)
//スロットル、サーボモータの値(pos)の範囲は、 0≦ pos ≦180 で与える。
//myservo.write 関数には回転角を絶対的な位置で与える。例) 90°から 45°反時計回りに動いてほしいときは、-45ではなく、45を関数に入力する。
/*ステアとスロットルの位置を記憶する変数*/
int CH1 = center_pos; //CH1:ステア
int CH2 = neutral_pos; //CH2:スロットル
/*プログラムの流れを制御する変数*/
int flag = 0; //アプリの起動状態を管理する変数。アプリがバックグラウンドに入ったときは1に設定する。アプリがバックグラウンドから復帰し、アプリのPボタンが押されたら0に設定してラジコン操作を有効にする。
char input = 'C'; //入力信号
unsigned long t1 = 0; //データ受信時間
unsigned long t2 = 0; //割り込み時の時間
unsigned long td = 0; //データ受信時間と割り込み時間の差
unsigned long t_loss_ST = 0; //ステア操作で失われた時間
unsigned long t_loss_TH = 0; //スロットル操作で失われた時間
unsigned long curr ; /*現在時刻を取得*/
unsigned long prev_ST = 0; /*前時刻を保存*/
unsigned long prev_TH = 0; /*前時刻を保存*/
/*Bluetooth通信に必要*/
BluetoothSerial ESP_BT; //ESP_BTという名前でオブジェクトを定義
/*割り込み関数onTimerで実行される内容*/
void IRAM_ATTR onTimer() {
digitalWrite(LED_PIN, !digitalRead(LED_PIN)); //前の出力と反転して点灯(チカチカする)
t2 = millis(); //割り込み時の時間を測定(100ms間隔)
td = t2 - t1; //割り込み時の時間と命令取得時間の差を取る。この差が大きいとき、アプリは起動していない状態。
}
/*ステアを操作する関数*/
void change_ST_pos(int goal_pos, unsigned long mov_speed) {
unsigned long delay_time = 50 - mov_speed; //処理を遅くする時間(この値が大きいとゆっくりな操作に)
if ((curr - prev_ST) >= delay_time) {
/*ステアを切る処理*/
//右折
if (goal_pos - CH1 > 0) {
CH1++;
myservo.write(CH1);
//左折
} else if (goal_pos - CH1 < 0) {
CH1--;
myservo.write(CH1);
//その他→ステアはそのまま
} else {
myservo.write(CH1);
}
prev_ST = curr; //前回に処理を実行した時刻を現在時刻に更新
}
}
/*スロットルを操作する関数*/
void change_TH_pos(int goal_pos, unsigned long mov_speed) {
unsigned long delay_time = 50 - mov_speed; //処理を遅くする時間(この値が大きいとゆっくりな操作に)
if ((curr - prev_TH) >= delay_time) {
/*スロットルを操作する処理*/
//前進
if (goal_pos - CH2 > 0) {
CH2++;
myesc.write(CH2);
//後退
} else if (goal_pos - CH2 < 0) {
CH2--;
myesc.write(CH2);
//その他→スロットルはそのまま
} else {
myesc.write(CH2);
}
prev_TH = curr; //前回に処理を実行した時刻を現在時刻に更新
}
}
void setup() {
pinMode(LED_PIN_ACTIVE, OUTPUT); //LEDの点灯ピンを出力用に設定
Serial.begin(115200); //シリアルモニタで確認用
ESP_BT.begin("ESP32_RC_Receiver"); //接続画面で表示される名前を設定 ★好きな名前にしてよい
myservo.attach(SERVO_PWM_PIN); //サーボモータのPWM端子とArduinoの4番ピンを接続 ★回路と対応した番号にする
myesc.attach(ESC_PWM_PIN); //ESCのPWM端子とArduinoの16番ピンを接続 ★回路と対応した番号にする
/*勝手には走りださないように設定*/
myservo.write(center_pos); // ステアを中心(Center)に
myesc.write(neutral_pos); //中立(Neutral)
/*割り込み処理(アプリ停止の検知に必要)の設定*/
pinMode(LED_PIN, OUTPUT); //LEDの点灯ピンを出力用に設定
timer = timerBegin(0, 80, true); //80クロック1カウント
timerAttachInterrupt(timer, &onTimer, true); //onTimerという名前の関数で割り込み
timerAlarmWrite(timer, 1000000 * 0.1, true); //80クロック×1000000カウント=1秒、1*0.1=100[ms]
timerAlarmEnable(timer); //タイマー有効化
}
void loop() {
curr = millis();
/*available()で受信した信号があるか確認*/
if (ESP_BT.available()) {
t1 = millis(); //データを取得した時間を記録
input = ESP_BT.read(); //受信したテキストを変数inputに保存
}
/*Pボタンが押されたらラジコンの操作を有効する(安全のため)*/
if (flag == 1 && input == 'C') {
flag = 0;
}
/*アプリ起動時(flag=0のとき)は操作を有効にする*/
if (flag == 0) {
/*命令に基づいてラジコンを制御*/
if (input == 'A') {
change_ST_pos(center_pos, mov_speed_ST); // ステアを中心(Center)に
change_TH_pos(forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'B') {
change_ST_pos(center_pos, mov_speed_ST); // ステアを中心(Center)に
change_TH_pos(backward_max, mov_speed_TH); //後退(Backward)
} else if (input == 'C') {
change_ST_pos(center_pos, mov_speed_ST); // ステアを中心(Center)に
change_TH_pos(neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'D') {
change_ST_pos(left_max, mov_speed_ST); // ステアを左(Left)に切る
change_TH_pos(neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'E') {
change_ST_pos(right_max, mov_speed_ST); // ステアを右(Right)に切る
change_TH_pos(neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'F') {
change_ST_pos(left_max, mov_speed_ST); // ステアを左(Left)に切る
change_TH_pos(forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'G') {
change_ST_pos(right_max, mov_speed_ST); // ステアを右(Right)に切る
change_TH_pos(forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'H') {
change_ST_pos(left_max, mov_speed_ST); // ステアを左(Left)に切る
change_TH_pos(backward_max, mov_speed_TH); //後退(Backward)
} else if (input == 'I') {
change_ST_pos(right_max, mov_speed_ST); // ステアを右(Right)に切る
change_TH_pos(backward_max, mov_speed_TH); //後退(Backward)
} else {
change_ST_pos(center_pos, 50); // ステアを中心(Center)に
change_TH_pos(neutral_pos, 50); //中立(Neutral)
}
}
/*シリアルモニタで確認用(ラジコンの制御には無関係)*/
Serial.print("Received signal=");
Serial.print(input);
Serial.print(",");
Serial.print("t1=");
Serial.print(t1);
Serial.print(",");
Serial.print("t2=");
Serial.print(t2);
Serial.print(",");
Serial.print("t2-t1=");
Serial.print(td);
Serial.print(",");
/*アプリがバックグラウンドに入ったとき(もしくは閉じたとき)、車体を停止させる処理(安全のため)*/
if (td > 150) {
Serial.print("Transmitter is NOT active"); //NOT active:アプリはバックグラウンド状態(もしく閉じている)
Serial.print("\n");
myservo.write(center_pos); // ステアを中心(Center)に
myesc.write(neutral_pos); //中立(Neutral)
input = ' ';
digitalWrite(LED_PIN_ACTIVE, LOW); //アプリがバックグラウンドに入ったとき(もしくは閉じたとき)はLEDを消灯
flag = 1; //アプリがバックグラウンド状態に入った(もしく閉じた)ときはflag=1に設定
} else {
Serial.print("Transmitter is active"); //active:アプリの画面が開いている
Serial.print("\n");
digitalWrite(LED_PIN_ACTIVE, HIGH); //アプリ起動時(画面を開いているとき)にはLEDを点灯
}
}3. 関連記事
- 前回 →→→ Bluetooth モジュールでRCサーボ・ESCを制御したい [第5回-安全性の向上]
- 次回 →→→ Bluetooth モジュールでRCサーボ・ESCを制御したい [第7回-回路をシンプル&コンパクトに]
4. 参考資料
-
Arduinoで遊ぶページ「実行タイミングの指定」、(https://garretlab.web.fc2.com/arduino/introduction/timing/) ↩︎