~ 目次 ~
1. 今回やりたいこと
この連載では、自作ラジコンコントローラーとレシーバをずっと作ってます(^^)/。
操縦用スマホアプリはMIT App Inventorで開発しているので外出先でもアプリの修正ができますが、ラジコン(レシーバ)側のマイコン(ESP32)はWindowsのArduino IDEなのでPCが必要です(泣)
始めはUMPC(超小型のPC、Windowsが使える)を買って対応しようとも思ったのですが、スマホでできることが分かったのでスマホでやることにしました!
スマホではArduinoDroidというアプリを使います。(これから説明します)
いろんなアプリでスクショをとったので、画像の大きさがバラバラですが許してください( ;∀;)
2. ArduinoDroidでESP32開発
2.1. アプリのインストール
AndroidスマホでGoogle Playストアを開いて、「ArduinoDroid」と検索&インストールします。
2.2. ライブラリの追加
サーボモータを制御するために、ESP32用のサーボライブラリを追加します。ここでは、jkb-gitさんの作った「Servo Library for ESP32」1を使わせていただきます。(ありがとうございます)
このライブラリをGitHubからzip形式でダウンロードしてきます。(ArduinoDroidでは既存のServoライブラリが使えなかった)
スマホのブラウザ(Google Chrome使用)からGitHubレポジトリのzipをダウンロードするときは、
- ブラウザをPC版サイトに切り替える
- Gitサイトの「Code」(←緑色)を押して、「Download zip」を押す。
- スマホのDownloadsフォルダに「ESP32Servo-master.zip」というファイルが保存される。(後でArduinoDroidで開きます)
zipファイルがダウンロードできたら、次はArduinoDroidを起動します。起動すると下のような画面が出てきます。

次に「画面右上の点点点マーク>Libraries>Add.ZIP library」と進み、先ほどダウンロードした「ESP32Servo-master.zip」を選んで、画面右上のチェックマークを押します。
2.3. ボードの設定
今回はESP32-WROOM-32Eを使うので「画面右上の点点点マーク>Settings>Board type>ESP32>DOIT ESP32 DEVKIT V1」を選択します。
YouTubeで操作方法を説明してくれている人がいた2ので参考にさせていただきました。
2.4. プログラムのコンパイル
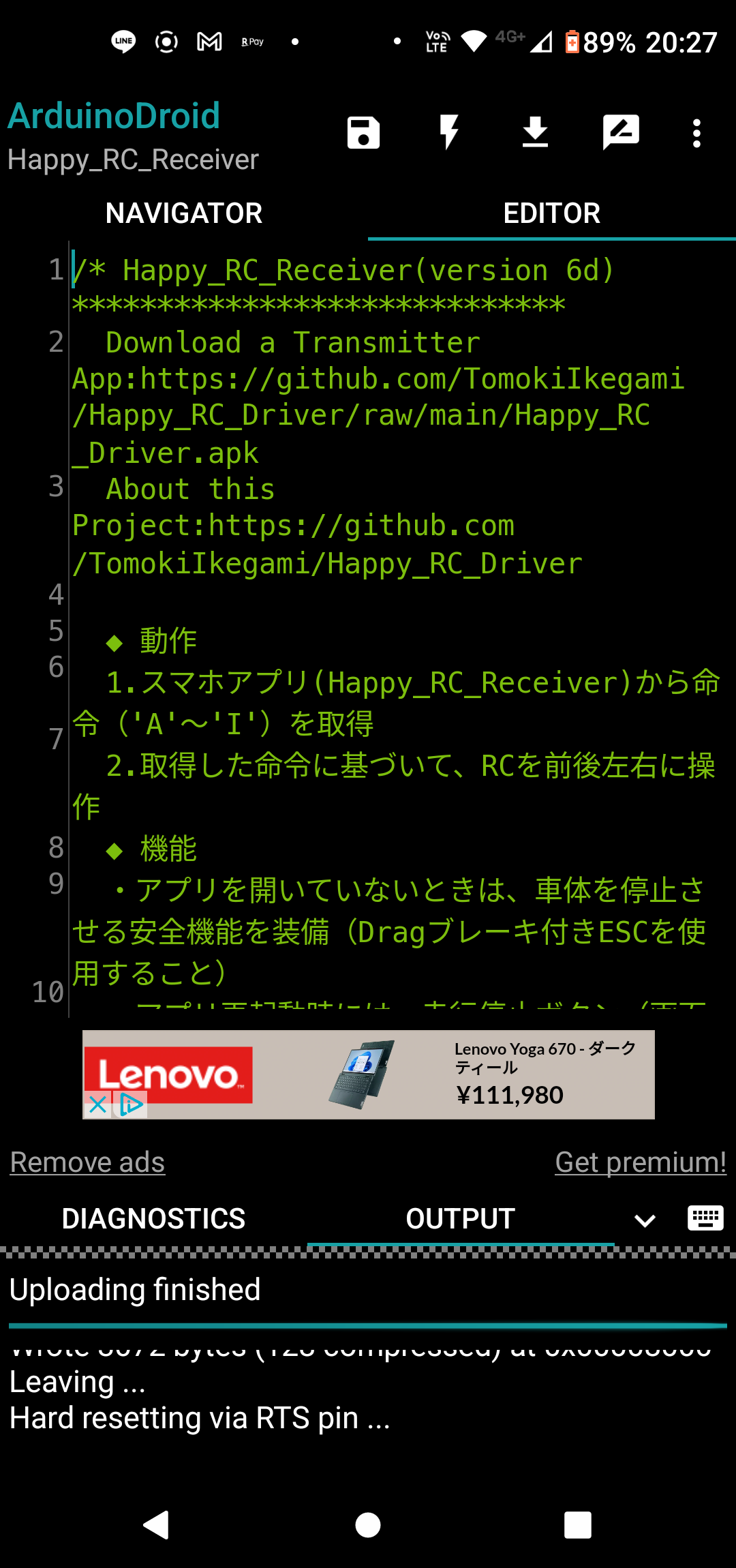
下のソースコードをArduinoDroidに貼り付け、コンパイル(画面上側のイナズママークを押す)します! (少し待ちます)
※細かい値(特にプログラム中の★マーク)は自分の持っている車体に合わせてセッティングしてください。
/* Happy_RC_Receiver(version 6d) *****************************
Download a Transmitter App:https://github.com/TomokiIkegami/Happy_RC_Driver/raw/main/Happy_RC_Driver.apk
About this Project:https://github.com/TomokiIkegami/Happy_RC_Driver
◆ 動作
1.スマホアプリ(Happy_RC_Receiver)から命令('A'~'I')を取得
2.取得した命令に基づいて、RCを前後左右に操作
◆ 機能
・アプリを開いていないときは、車体を停止させる安全機能を装備(Dragブレーキ付きESCを使用すること)
・アプリ再起動時には、走行停止ボタン(画面中央のPボタン)を押さないと走行しない(アプリ再起動時に急に走行する危険を防ぐため)
・カクカクではなく滑らかな走行が可能に
・速度の切り替えが可能に(2種類の速度)
◆ 補足
・プログラム中で★マークがついている部分は、自分の装置に合わせて調整
*************************************************************/
/*ハードウェアの接続ピンの設定*/
#define LED_PIN 2 //走行には無関係。2番ピンにLEDのアノード(+)を接続すると割り込み処理の間隔(100ms)でLEDが点滅
#define LED_PIN_ACTIVE 17 //走行には無関係。17番ピンにLEDのアノード(+)を接続すると、アプリ起動時のみLEDが点灯
#define SERVO_PWM_PIN 4 //サーボモータのPWMピン(信号入力ピン)をESP32の4番ピンに接続 ★回路と対応した番号にする
#define ESC_PWM_PIN 16 //ESCのPWMピン(信号入力ピン)をESP32の16番ピンに接続 ★回路と対応した番号にする
/*タイマーの定義*/
hw_timer_t*timer = NULL;
/*ライブラリ*/
#include "BluetoothSerial.h" //ESP32のBluetooth通信に使用
#include <ESP32Servo.h> //サーボモータの制御に使用
/*ESC,サーボのオブジェクト作成*/
Servo myservo; // サーボモータを制御するためのServoオブジェクト作成
Servo myesc; // ESCを制御するためのServoオブジェクト作成
int pulsew_min=500; //minimum pulse width of servo motor
int pulsew_max=2400; //maximum pulse width of servo motor
/* ステアリングの設定 */
unsigned long mov_speed_ST = 40; //ステア移動速度
int center_pos = 95; //ステア中心位置 [サーボモータの中心位置 (90°)] ★まっすぐ走るように調整。90より大きい値にするとステア(ハンドル)が右寄りに、90より小さい値にするとステア(ハンドル)が左寄りになる
int left_DR = 20; //左の切れ角 ★:好みに合わせて調整。ただし大きくしすぎないように注意。
int right_DR = 25; //右の切れ角 ★:好みに合わせて調整。ただし大きくしすぎないように注意。
int left_max = center_pos - left_DR; //左ステアの最大位置 [中心位置より反時計回りに20°(left_DR)回転した位置] ★逆に動くときはleft_DRの手前の符号をプラス(+)に
int right_max = center_pos + right_DR; //右ステアの最大位置 [中心位置より時計回りに25°(right_DR)回転した位置] ★逆に動くときはright_DRの手前の符号をマイナス(-)に
/* スロットルの設定 */
unsigned long mov_speed_TH = 0; //スロットル移動速度
unsigned long mov_speed_brk = 40; //ブレーキ速度
int neutral_pos = 93; //中立位置 [スロットルの中立位置 (90) ★ESCの設定によってずれがあるので、前後に走行しないよう値を調整する。※ ESC側を90で中立になるよう設定(上級者向け。ESCの説明書通りプロポでニュートラル設定を済ませてから、このプログラムの値を調整するのがオススメ)してもよい。]
int forward_DR = 20; //前進の速さ ★好みの速度に調整
int backward_DR = 20; //バックの速さ ★好みの速度に調整
int forward_max = neutral_pos + forward_DR; //前進の最大位置 ★逆に動くときはforward_DRの手前の符号をマイナス(-)に
int backward_max = neutral_pos - backward_DR; //バックの最大位置 ★逆に動くときはbackward_DRの手前の符号をプラス(+)に
int turbo_speed = 120; //全開走行時の速度(180が最大。速すぎると思ったら170や160など値を小さくしてみる)
/*値設定の注意点*/
//速度(mov_speed_ST,mov_speed_TH)は 0-50 の範囲で与える。(0:最低速度、50:最大速度)
//スロットル、サーボモータの値(pos)の範囲は、 0≦ pos ≦180 で与える。
//myservo.write 関数には回転角を絶対的な位置で与える。例) 90°から 45°反時計回りに動いてほしいときは、-45ではなく、45を関数に入力する。
/*ステアとスロットルの位置を記憶する変数*/
int CH1 = center_pos; //CH1:ステア
int CH2 = neutral_pos; //CH2:スロットル
/*プログラムの流れを制御する変数*/
int flag = 0; //アプリの起動状態を管理する変数。アプリがバックグラウンドに入ったときは1に設定する。アプリがバックグラウンドから復帰し、アプリのPボタンが押されたら0に設定してラジコン操作を有効にする。
int turbo_flag = 0; //ターボ有効時には1に設定
char input = 'C'; //入力信号
unsigned long t1 = 0; //データ受信時間
unsigned long t2 = 0; //割り込み時の時間
unsigned long td = 0; //データ受信時間と割り込み時間の差
unsigned long t_loss_ST = 0; //ステア操作で失われた時間
unsigned long t_loss_TH = 0; //スロットル操作で失われた時間
unsigned long curr ; /*現在時刻を取得*/
unsigned long prev_ST = 0; /*前時刻を保存*/
unsigned long prev_TH = 0; /*前時刻を保存*/
/*Bluetooth通信に必要*/
BluetoothSerial ESP_BT; //ESP_BTという名前でオブジェクトを定義
/*割り込み関数onTimerで実行される内容*/
void IRAM_ATTR onTimer() {
digitalWrite(LED_PIN, !digitalRead(LED_PIN)); //前の出力と反転して点灯(チカチカする)
t2 = millis(); //割り込み時の時間を測定(100ms間隔)
td = t2 - t1; //割り込み時の時間と命令取得時間の差を取る。この差が大きいとき、アプリは起動していない状態。
}
/*ステアを操作する関数*/
void change_ST_pos(int goal_pos, unsigned long mov_speed) {
unsigned long delay_time = 50 - mov_speed; //処理を遅くする時間(この値が大きいとゆっくりな操作に)
if ((curr - prev_ST) >= delay_time) {
/*ステアを切る処理*/
//右折
if (goal_pos - CH1 > 0) {
CH1++;
myservo.write(CH1);
//左折
} else if (goal_pos - CH1 < 0) {
CH1--;
myservo.write(CH1);
//その他→ステアはそのまま
} else {
myservo.write(CH1);
}
prev_ST = curr; //前回に処理を実行した時刻を現在時刻に更新
}
}
/*スロットルを操作する関数*/
void change_TH_pos(int goal_pos, unsigned long mov_speed) {
unsigned long delay_time = 50 - mov_speed; //処理を遅くする時間(この値が大きいとゆっくりな操作に)
if ((curr - prev_TH) >= delay_time) {
/*スロットルを操作する処理*/
//前進
if (goal_pos - CH2 > 0) {
CH2++;
myesc.write(CH2);
//後退
} else if (goal_pos - CH2 < 0) {
CH2--;
myesc.write(CH2);
//その他→スロットルはそのまま
} else {
myesc.write(CH2);
}
prev_TH = curr; //前回に処理を実行した時刻を現在時刻に更新
}
}
void setup() {
pinMode(LED_PIN_ACTIVE, OUTPUT); //LEDの点灯ピンを出力用に設定
Serial.begin(115200); //シリアルモニタで確認用
ESP_BT.begin("ESP32_RC_Receiver"); //接続画面で表示される名前を設定 ★好きな名前にしてよい
myservo.attach(SERVO_PWM_PIN,pulsew_min,pulsew_max); //サーボモータのPWM端子とArduinoの4番ピンを接続 ★回路と対応した番号にする
myesc.attach(ESC_PWM_PIN,pulsew_min,pulsew_max); //ESCのPWM端子とArduinoの16番ピンを接続 ★回路と対応した番号にする
/*勝手には走りださないように設定*/
myservo.write(center_pos); // ステアを中心(Center)に
myesc.write(neutral_pos); //中立(Neutral)
/*割り込み処理(アプリ停止の検知に必要)の設定*/
pinMode(LED_PIN, OUTPUT); //LEDの点灯ピンを出力用に設定
timer = timerBegin(0, 80, true); //80クロック1カウント
timerAttachInterrupt(timer, &onTimer, true); //onTimerという名前の関数で割り込み
timerAlarmWrite(timer, 1000000 * 0.1, true); //80クロック×1000000カウント=1秒、1*0.1=100[ms]
timerAlarmEnable(timer); //タイマー有効化
}
void loop() {
curr = millis();
/*available()で受信した信号があるか確認*/
if (ESP_BT.available()) {
t1 = millis(); //データを取得した時間を記録
input = ESP_BT.read(); //受信したテキストを変数inputに保存
}
/*Pボタンが押されたらラジコンの操作を有効する(安全のため)*/
if (flag == 1 && input == 'C') {
flag = 0;
}
/*アプリ起動時(flag=0のとき)は操作を有効にする*/
if (flag == 0) {
/*命令に基づいてラジコンを制御*/
if (input == 'A') {
change_ST_pos(center_pos, mov_speed_ST); // ステアを中心(Center)に
change_TH_pos(forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'B') {
change_ST_pos(center_pos, mov_speed_ST); // ステアを中心(Center)に
change_TH_pos(backward_max, mov_speed_TH); //後退(Backward)
} else if (input == 'C') {
forward_max = neutral_pos + forward_DR; //標準の速度に設定
change_ST_pos(center_pos, mov_speed_ST); // ステアを中心(Center)に
change_TH_pos(neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'D') {
change_ST_pos(left_max, mov_speed_ST); // ステアを左(Left)に切る
change_TH_pos(neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'E') {
change_ST_pos(right_max, mov_speed_ST); // ステアを右(Right)に切る
change_TH_pos(neutral_pos, mov_speed_brk); //中立(Neutral)
} else if (input == 'F') {
change_ST_pos(left_max, mov_speed_ST); // ステアを左(Left)に切る
change_TH_pos(forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'G') {
change_ST_pos(right_max, mov_speed_ST); // ステアを右(Right)に切る
change_TH_pos(forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'H') {
change_ST_pos(left_max, mov_speed_ST); // ステアを左(Left)に切る
change_TH_pos(backward_max, mov_speed_TH); //後退(Backward)
} else if (input == 'I') {
change_ST_pos(right_max, mov_speed_ST); // ステアを右(Right)に切る
change_TH_pos(backward_max, mov_speed_TH); //後退(Backward)
} else if (input == 'J') {
forward_max = turbo_speed; //ターボの速度に設定
change_TH_pos(forward_max, mov_speed_TH); //前進(Forward)
} else if (input == 'K') {
forward_max = neutral_pos + forward_DR; //標準の速度に設定
change_TH_pos(forward_max, mov_speed_TH); //前進(Forward)
} else {
change_ST_pos(center_pos, 50); // ステアを中心(Center)に
change_TH_pos(neutral_pos, 50); //中立(Neutral)
}
}
/*シリアルモニタで確認用(ラジコンの制御には無関係)*/
Serial.print("Received signal=");
Serial.print(input);
Serial.print(",");
Serial.print("t1=");
Serial.print(t1);
Serial.print(",");
Serial.print("t2=");
Serial.print(t2);
Serial.print(",");
Serial.print("t2-t1=");
Serial.print(td);
Serial.print(",");
/*アプリがバックグラウンドに入ったとき(もしくは閉じたとき)、車体を停止させる処理(安全のため)*/
if (td > 150) {
Serial.print("Transmitter is NOT active"); //NOT active:アプリはバックグラウンド状態(もしく閉じている)
Serial.print("\n");
myservo.write(center_pos); // ステアを中心(Center)に
myesc.write(neutral_pos); //中立(Neutral)
input = ' ';
digitalWrite(LED_PIN_ACTIVE, LOW); //アプリがバックグラウンドに入ったとき(もしくは閉じたとき)はLEDを消灯
flag = 1; //アプリがバックグラウンド状態に入った(もしく閉じた)ときはflag=1に設定
} else {
Serial.print("Transmitter is active"); //active:アプリの画面が開いている
Serial.print("\n");
digitalWrite(LED_PIN_ACTIVE, HIGH); //アプリ起動時(画面を開いているとき)にはLEDを点灯
}
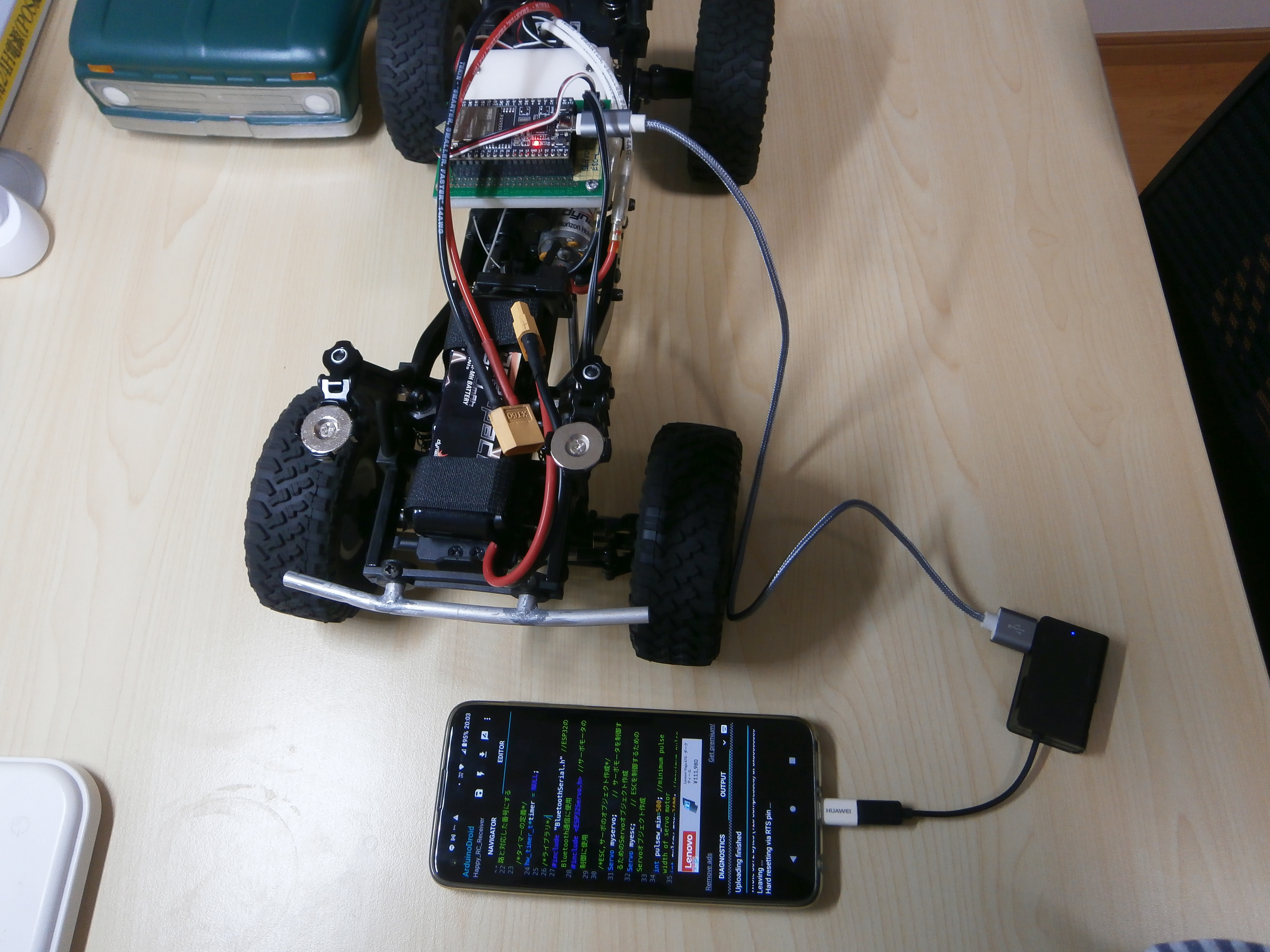
}2.5. 書き込み
書き込みの手順は、
- まず、スマホとESP32をUSBケーブルで接続(直接つなげるケーブルを用意するか、USB変換などを使うとよいです)
- 書き込み(画面上側の下矢印マーク↓)ボタンを押します
- このときUSBポートの情報いくつか出てくるのでどれかをクリック(うまくいかなかったら違うのを選んでみてください…)
- 次にアクセスしていいか聞くようなメッセージが出てくるのでOKを押します
- 書き込みが終わるまで(表示が100%になるまで)少し待ちます。「Hard resetting via RTS pin …」というメッセージが出たらOKです!
これで外出先でもプログラムが修正できる!(‘ω’) すごい便利!!
3. 関連記事
- 前回 →→→ Bluetooth モジュールでRCサーボ・ESCを制御したい [第8回-ターボ機能を追加]
- 次回 →→→ Bluetooth モジュールでRCサーボ・ESCを制御したい [第10回-スライダ操作式のラジコンアプリに]
4. 参考文献
-
jkb-git「Servo Library for ESP32」、(https://github.com/jkb-git/ESP32Servo) ↩︎
-
YouTube「How to program ESP32 using arduino droid | How to program ESP32 using android phone | part-3」、(https://www.youtube.com/watch?v=_0a-lwx3o5U&t=160s) ↩︎